Posturob I
Introduction
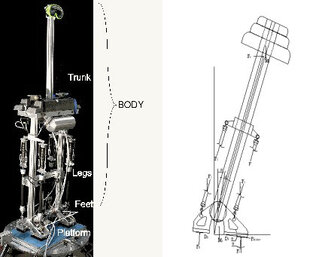
PostuRob I is the first of a series of testing devices for our model of human postural control. It was built by the "Wissenschaftlichen Werkstätten" of the Neuro-Center Freiburg. Its anthropometric parameters are similar to those of a human (see below) and therefore it serves well for determining the performance of a given postural control model, by comparing its behavior with that of human subjects during postural experiments. The models can be implemented in Simulink(R) and "downloaded" into the robot. This gives us a platform for comparing across different human postural control models.
PostuRob 1 has only one degree of freedom (ankle joints), representing an "inverted pendulum" model of human posture.
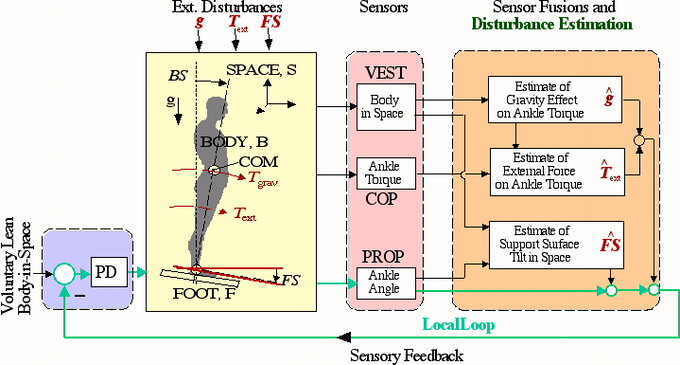
Our multi-sensory interaction model (literature, see below) is able to produce voluntary lean movements while compensating at the same time for surface tilts and pull disturbances in the sagittal plane. It is capable of these task also while standing on a BSRP (Body Sway Referenced Platform ) (see videos below for demonstration) or foam rubber.
This document describes general aspects of the robot and its testing environment. For futher information and references see literature below.
Technical Information
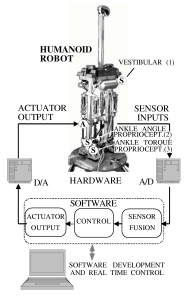
The technical sensors used in the robot were
- Goniometers (SP2801 A502, Novotechnik, Ostfildern, Germany),
- Force sensors (Type 8526-6001, Burster, Gernsbach, Germany), and a combination of
- Gyrometer and Accelerometers (Types ADXRS401and ADXL203, respectively, Analog Devices, Norwood, USA).
Sensor data is fed via custom made hardware and AD device into the control model implemented under Simulink/Matlab on an Embedded-PC (MOPSlcd7, Kontron, Deggendorf, Germany). Biologically identified non-linearities (thresholds, sensor weighting mechanism) and a dead time of 150 ms are implemented as well.
The dimensions of the robot followed anthropometric data of a 1.9 m tall and 62 kg person.
|
Height (h) |
1.90m |
|
Weigth (m) |
62kg |
|
Spring constant (representing tendons) |
48 N/mm |
|
COM height |
0.91m |
for a more detailed description of the robots parameters see literature below
Actuators: Pneumatic muscles (MAS20, Festo, Esslingen, Germany), were used to mimic ankle joint muscles.
The pneumatic valves (proportional directional control valves, MPYE-5-1/4-010-B, Festo, Esslingen, Germany) are controlled by a cascading control of air-pressure and torque/force. Force sensors in the muscle fixations are used to yield a desired active torque while air-pressure is controled seamlessly by the hardware. For the task under investigation, the actuators can be considered to show essentially ideal performance. We added to them in-series springs to mimic the tendons. The effect of the spring is chosen to be < m*g*h (gravity g= 9.81 m/(s^2)) which would be too small to keep the robot upright passively.
Actuator Performance

Stimulation devices are a mechanical motion platform and servo-controlled cable winches for pull stimulation. External platform tilt and body pull stimuli are applied my means of a PC and custom made software.
Measuring devices comprise a force platform mounted on the motion platform to register the Center of Pressure/COP (Kistler®, platform type 9286, Winterthur, Switzerland) and an optoelectronic device for kinematic measures (Optotrak 3020®, Waterloo, Canada).
Acquisition of stimulus parameters, robot position and platform position is performed by means of another PC via analog-digital converter (sampling rate, 100 Hz) and software programmed in LabView® (National Instruments, Austin, Texas).
Data Analysis are performed off-line with custom-made software programmed in MATLAB® (The MathWorks Inc., Natick, MA, USA).
Model (function principle), strictly derived from human postural response data
Videos
These films show PostuRob performing a voluntary lean (sinusoid, film 1). It can do so even with superimposed support surface tilt (platform sinusoid at different frequency and amplitude, film 2). A critical test for equilibrium control in humans, in which vestibular-loss subjects with eyes closed regulary fall, is the Body-Sway-Referenced-Platform (BSRP) condition. In this condition, the body-in-space angle is recorded using an optoelectronic device and fed back to the body support surface (motion platform) such that the ankle angle remains approximately constant (film 3). PostuRob is able to cope with this condition even if additionally tilt or pull stimuli are superimposed (film 4). Furthermore, PostuRob is able to stand on soft ground, even in the presence of external stimuli (film 5).
- 1. Voluntary movement (Quicktime, 30MB)
amplitude: 3° , frequency: 0.3Hz
- 2. Voluntary movement with platform tilt (Quicktime, 44MB)
voluntary: amplitude: 3° , frequency: 0.3Hz
platform: amplitude: 4° , frequency: 0.2Hz
- 3. Demonstration of the BSRP (Quicktime, 18MB)
The platform is following the body-in-space angle, so that the body-to-foot angle is kept constant.
- 4. BSRP with additional pull stimulus (Quicktime, 25MB)
- 5. Pull-stimulus on foam rubber (Quicktime, 12MB)